Publications
 Geometric Approaches to Motion Planning for
Geometric Approaches to Motion Planning for
Two Classes of Low Reynolds Number Swimmers
J. Grover
Thesis for Masters of Science in Robotics pdf
 Control Barrier Functions-based Semi-Definite
Control Barrier Functions-based Semi-Definite
Programs (CBF-SDPs): Robust Safe Control For
Dynamic Systems with Uniform Parametric Uncertainty
J. Grover, C. Liu, K. Sycara. pdf
 Distributed Multirobot Control
Distributed Multirobot Control
For Noncooperative Herding
J. Grover, N. Mohanty, C. Liu, K. Sycara.
Distributed Autonomous Robotic Systems (DARS 2022) pdf, videos
 Noncooperative Herding With Control Barrier
Noncooperative Herding With Control Barrier
Functions: Theory and Experiments
J. Grover, N. Mohanty, W. Luo, C. Liu, K. Sycara.
IEEE Conference on Decision and Control (CDC 2022) pdf, videos
 Pedestrian Dynamics Inference Using Control
Pedestrian Dynamics Inference Using Control
Barrier Functions and Mixed-Integer
Quadratic Programming
J. Grover, Y. Lyu, W. Luo, C. Liu, J. Dolan, K. Sycara.
IFAC Cyber-physical and Human Systems (CPHS) 2022 pdf
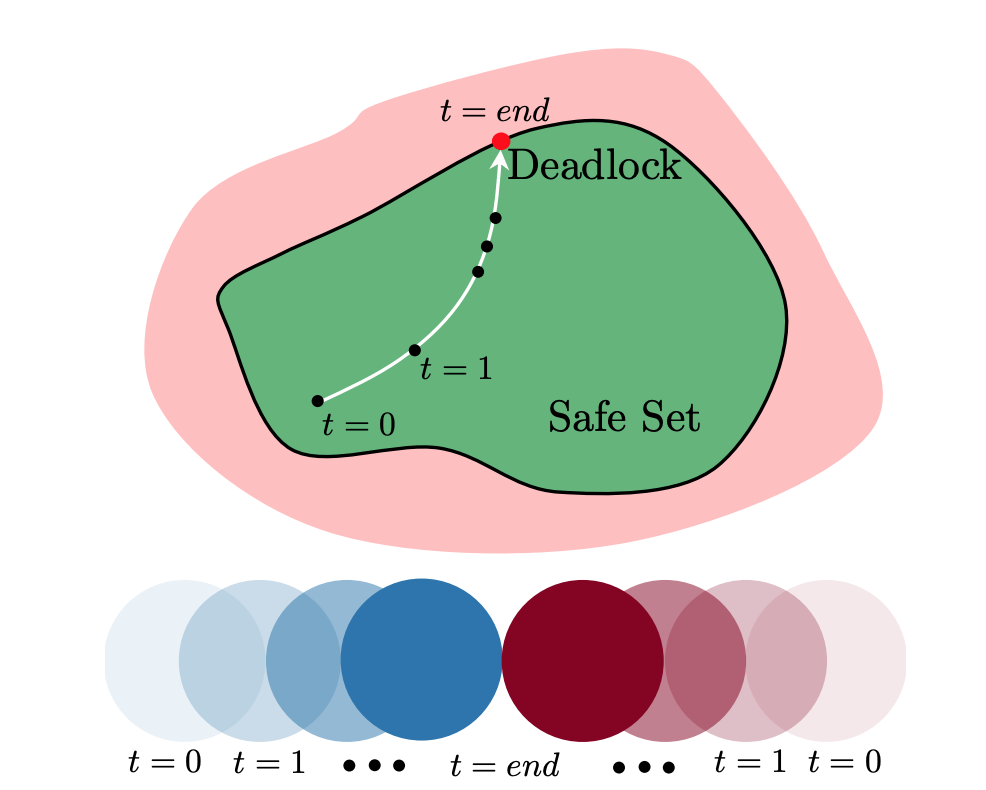 The Before, During and After
The Before, During and After
of Multirobot Deadlock
J. Grover, C. Liu, K. Sycara.
Accepted in International Journal of Robotics Research (IJRR) pdf
 Simultaneously Learning Safety Margins
Simultaneously Learning Safety Margins
and Costs in Multirobot Systems
J. Grover, C. Liu, K. Sycara.
RSS Workshop, Behavior Inference in Multiagent Systems
pdf
 System Identification for Safe Controllers
System Identification for Safe Controllers
using Inverse Optimization
J. Grover, C. Liu, K. Sycara.
MECC 2021
pdf
FREUD: Feasible Region-based Estimation Using Duality
(Extended Version)
J. Grover, C. Liu, K. Sycara.
ECC 2021
pdf, videos
Parameter Identification of Multirobot Systems using Optimization
based Controllers
J. Grover, C. Liu, K. Sycara.
MRS 2021
pdf, videos
 Why does symmetry cause deadlocks?
Why does symmetry cause deadlocks?
J. Grover, C. Liu, K. Sycara.
IFAC World Congress 2020
pdf, videos
 Provably Safe in the Wild: Testing Control Barrier Functions on a
Provably Safe in the Wild: Testing Control Barrier Functions on a
Vision-Based Quadrotor in an Outdoor Environment
C. Ho, K. Shih, J. Grover, C. Liu, S. Scherer
RSS Workshop on Robust Autonomy 2020
pdf, videos
Deadlock Analysis and Resolution for Multirobot Systems
J. Grover, C. Liu, K. Sycara.
Workshop on Algorithmic Foundations of Robotics (WAFR) 2020
pdf, extended pdf, videos
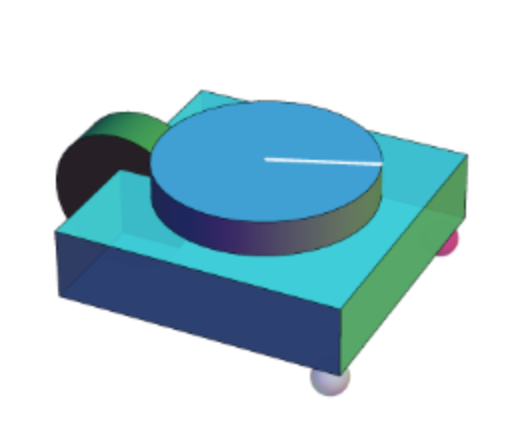
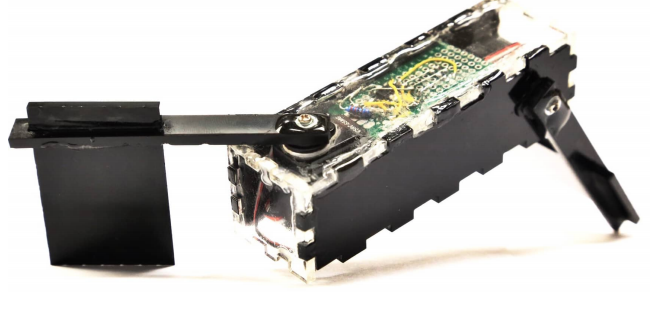
Motion Planning, Design Optimization and Fabrication of
Ferromagnetic Swimmers
J. Grover, D. Vedova, N. Jain, M. Travers, H. Choset.
Robotics Science and Systems (RSS) 2019
pdf, recorded presentation, videos
 Planar Motion Control, Coordination and Dynamic
Planar Motion Control, Coordination and Dynamic
Entrainment in Chaplygin Beanies
S. Kelly, R. Abrajan, J. Grover, H. Choset, M. Travers.
Dynamic Systems and Controls Conference (DSCC) 2018, pdf
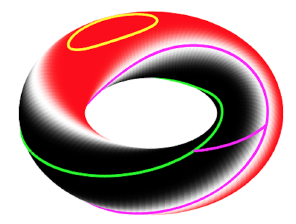 Geometric Mechanics and Gait Design on Cylindrical
Geometric Mechanics and Gait Design on Cylindrical
and Toroidal Shape spaces
J. Grover, D. Vedova, N. Jain, M. Travers, H. Choset.
Dynamic Systems and Controls Conference (DSCC) 2018, pdf
 Geometric Motion Planning for Three-Link
Geometric Motion Planning for Three-Link
Yaw-Pitch Swimmer in a Low-Reynolds Regime
J. Grover, J. Zimmer, T. Dear, S. Kelly, M. Travers, H. Choset.
American Controls Conference (ACC) 2018
pdf, videos
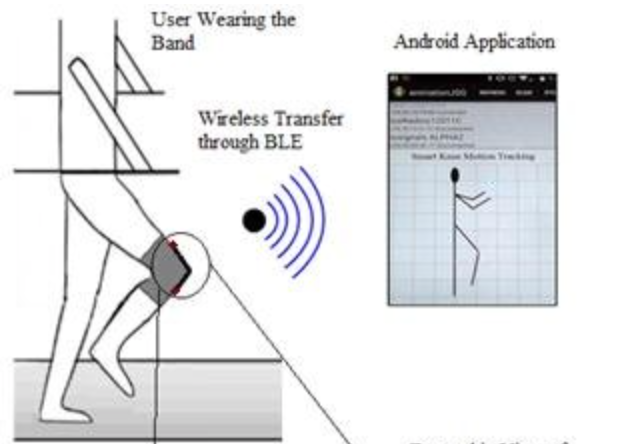 Estimation and Tracking of Knee Angle Trajectory
Estimation and Tracking of Knee Angle Trajectory
using Inertial Sensors and a Smartphone Application
J. Grover, V. Natarajan.
EAI International Conference on Body Area Networks 2015, pdf
 Studying Crosstalk Trends for Signal Integrity on
Studying Crosstalk Trends for Signal Integrity on
Interconnects using Finite Element Modeling
J. Grover, A. Gupta.
COMSOL Conference, 2013, pdf